Overview
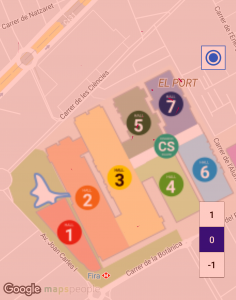
London build expo 2025., as the biggest UK construction industry fair, has been held in London Olympia in November. Some of the exhibitors are presented below, in the order in which an imaginary project would be built by someone:
- Choose the site, based on some usual parameters (e.g. distance from the rail station, appropriate size of nearby water pipelines, electricity and road, in the centre of the intended customers dwellings).
- Prepare documentation for:
- submission proposal to obtain appropriate permissions
- architectural plans and
- compliance to environment, security and other requirements
- add documentation to plan and execute construction itself – like tasks, material, invoices, contracts
- Building information model (BIM)
- Enterprise resource management (ERP)
- submission proposal to obtain appropriate permissions
- Assure access to the construction site (e.g. roads, cranes), make amenities for workers, store material, tools (robots), vehicles, car chargers and secure the site itself, then
- organise day-to-day work, e.g. workers communication,
- prepare and check every task
- Commission the building once completed
Along the process consultancies are always ready to help. Especially if the work is specific, e.g. cooling system for data centre.
| Site acquisition | Landstack drone: 7video spacesurvey surveys4BM openspace.ai TerraQuest | LandGPT |
| Proposal submission | ||
| Architecture | ||
| Compliance | kiwa | |
| Documentation control | BuilderStorm | |
| Project planning / management | FIELDWIRE thinklogic Plan radar Verto | |
| Building information model (BIM) | bim-lab | |
| Enterprise resource management (ERP) | ||
| Road maintenance | Metrail | |
| Storage | thebikestoragecompany | |
| Materials | stoneworldoxfordshire | |
| Robots | Camhirst house | |
| Cranes | Skyform | |
| Accommodation | storageonsite | |
| Amenities | ZaptecGo Superloo from Trovex | |
| Security | prime-secure | |
| Communication / co-ordination | Kraaft gobridgit | |
| Commision | CxAlloy | |
| Consultancy | Desimone | |
| Data centre | nupiindustrieitaliene |
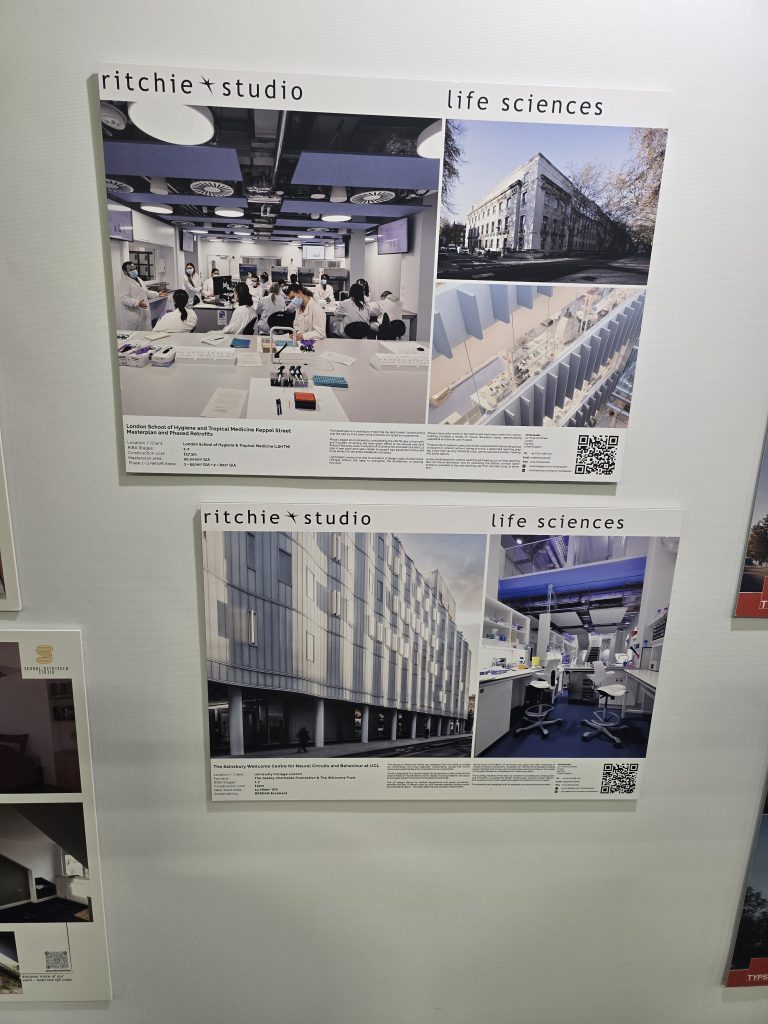
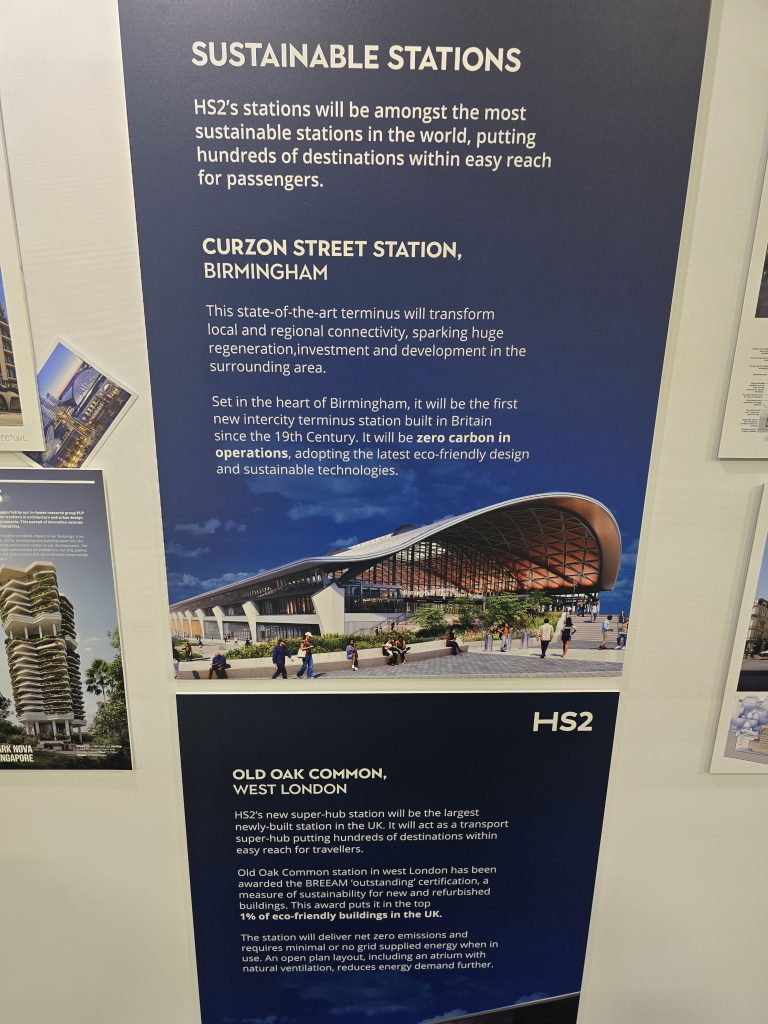
Architecture from London studios in 2024.



















AI panels
- A Digital Revolution: Digitising Offsite Construction
According to Financial times, the government has set targets for 2030., that commercial property has to be at least EPC (Energy performance certificate) band A or B. That makes 70% of commercial property in London as stranded assets. The required investment is huge (in relative terms to the UK GDP).
While someone can argue that governments, targets and laws do change, what is not changing is energy prices going up – which makes investment in e.g. thermal isolation profitable.
One panellist claims 25% savings when retrofitting by using AI (in planning and execution). - Unlocking the Untapped Potential in PropTech
Uninspiring panel. For more information possibly check Cretech – innovation in real estate tech. - WORKSHOP: Hey ChatGPT, Finish This Building
(Note: ChatGPT in construction industry would be the hottest topic. I missed this workshop, yet very few exhibitors have advanced AI solutions.)
Notes
AI only started to enter construction industry as whole. ChatGPT specialised plug-ins will probably first enter these:
- Communication on site
- Land acquisition and proposal submission
- Document control
There were claims that there will be savings by providing new standardised blocks (a silly example: no one is building doors themselves but buys them as a product). This will come from two directions:
- standardising more complex block from simpler blocks
- coming down from the top of the project
(say, having surveying and land acquisition as a single step)